| |
name / task / value |
click |
double click |
| 1 |
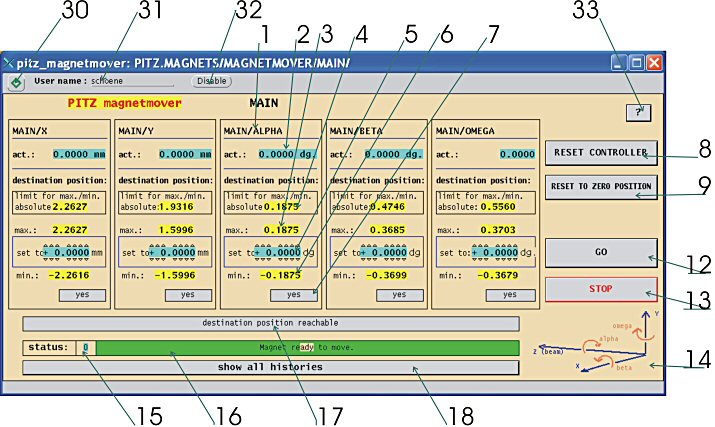
coordinate name |
|
|
| 2 |
actual position of this coordinate |
|
|
| 3 |
upper limit of this coordinate |
|
|
| 4 |
absolute limit for max./min. of this coordinate |
|
|
| 5 |
set to value (used by GO)
|
change the value
|
|
| 6 |
lower limit of this coordinate
|
|
|
| 7 |
| position is reachable |
yes |
| position is not reachable |
no |
|
|
|
| 8 |
reset the controller |
do it |
|
| 9 |
reset to zero position is possible:
| yes |
RESET TO ZERO POSITION |
| no |
RESET TO ZERO POSITION
can't reset to zero position |
|
| reset to zero pos. |
nothing
|
|
|
| 12 |
go (make the "set to" (5) or "delta" (4)) if possible:
| yes |
GO |
| no |
GO
can't go (see mover status) |
|
|
|
| 13 |
stop moving immediatly |
|
|
| 14 |
sketch of the coordinate system |
|
|
| 15 |
status value (integer) |
|
|
| 16 |
status text |
|
|
| 17 |
| position is reachable |
destination position reachable |
| position is not reachable |
destination
position not reachable |
|
|
|
| 18 |
show histories of all coordinates |
pitz_magnetmover_histories |
|
| 30 |
secure sign |
enable user logon |
|
| 31 |
logon user name |
|
|
| 32 |
disable user logon |
disable user logon |
|
| 33 |
help button |
this window |
|