| |
name / task / value |
click |
double click |
| 1 |
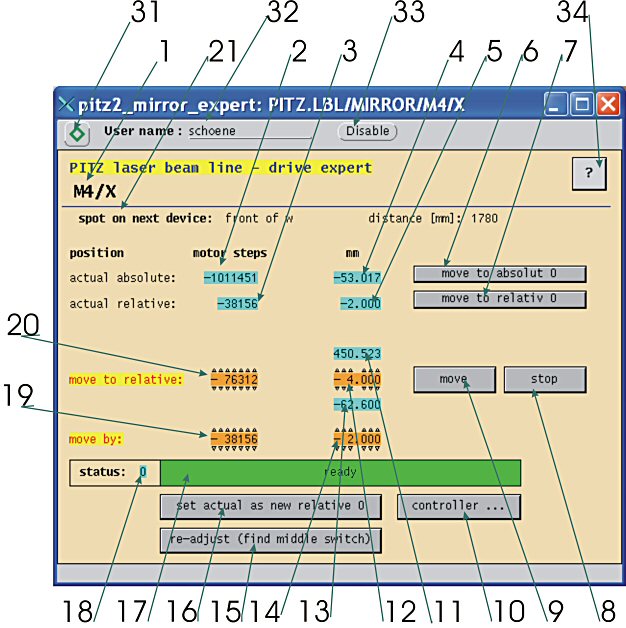
name of the device and coordinate (also DOOCS address) |
|
|
| 2 |
actuel absolute position (in motor steps) |
|
|
| 3 |
actuel relative position (in motor steps), see [16] |
|
|
| 4 |
actuel absolute position (in mm) |
|
|
| 5 |
actual relative position (in mm), see [16] |
|
|
| 6 |
move to absolute zero position |
do it |
|
| 7 |
move to relative zero position, see [16] |
do it |
|
| 8 |
stop moving immediately |
do it |
|
| 9 |
move to the position specified at [12], [14], [19], [20] |
do it |
|
| 10 |
open the controller window |
pitz2_micos_controller |
|
| 11 |
upper limit for [12] |
|
|
| 12 |
specify the target position for the next move
(in mm, relative to 'relative 0', for 'relative 0' see [16])
If you change this value, values [14], [19], [20] will be changed by
the server accordingly. No movement will take place until you press
the move button [9]. |
change the value |
|
| 13 |
lower limit for [12] |
|
|
| 14 |
specify the target position for the next move
(in mm, relative to the actual postion) |
change the value |
|
| 15 |
readjust (find middle switch) |
do it |
|
| 16 |
set the actual relative position as new relative zero position
(see [comments] above) |
set it |
|
| 17 |
state and state text of the moving device for all coordinates
|
|
|
| 18 |
state number of the moving device:
| 0 |
OK and ready |
| < 0 |
error |
| > 0 |
moving or target position not reachable |
|
|
|
| 19 |
specify the target position for the next move
(in motor steps, relative to the actual postion) |
change the value |
|
| 20 |
specify the target position for the next move
(in motor steps, relative to 'relative 0', for 'relative 0' see [16])
If you change this value, values [14], [19], [20] will be changed by
the server accordingly. No movement will take place until you press
the move button [9]. |
change the value |
|
| 21 |
next device information (name and distance) |
|
|
| 31 |
secure sign |
enable user logon |
|
| 32 |
logon user name |
|
|
| 33 |
disable user logon |
disable user logon |
|
| 34 |
help button |
this window |
|